Med den snabba utvecklingen av smarta hem har robotdammsugare blivit standardutrustning för modern hushållsstädning. Bland de många kärnkomponenterna i golvsopmaskiner spelar mikrostegmotorer en allt viktigare roll på grund av deras fördelar med exakt styrning, lågt ljud och lång livslängd. Den här artikeln kommer att fördjupa sig i de specifika tillämpningsscenarierna, tekniska fördelarna och urvalspunkterna för mikrostegmotorer i golvsopmaskiner.

Vad är en miniatyrstegmotor
En mikrostegmotor är ett ställdon som omvandlar elektriska pulssignaler till vinkel- eller linjär förskjutning. Till skillnad från vanliga likströmsmotorer roterar den rotorn med en fast vinkel (kallad stegvinkel) varje gång den tar emot en pulssignal. Denna "open-loop control"-funktion gör att mikrostegmotorer kan uppnå exakt positionering utan behov av kodare, vilket gör dem särskilt lämpliga för smarta enheter som golvrengörare som är känsliga för volym och kostnad.
De fyra kärntillämpningarna av mikrostegmotorer i golvsopmaskiner

1. Drivkraften i navigationssystemet Laser Radar (LDS)
För närvarande använder alla de vanliga sopmaskinerna i mellan- och högklass laserradarnavigeringsteknik. LDS-moduler kräver hög rotationshastighet (vanligtvis 300-600 rpm) för att skanna omgivningen, samtidigt som de har extremt höga krav på hastighetsstabilitet. Mikrostegmotorer är ett idealiskt val för LDS-drivare på grund av deras följande egenskaper:
Noggrann hastighetskontroll:Genom att justera pulsfrekvensen kan hastigheten styras exakt för att säkerställa enhetlighet i punktmolnsdatainsamlingen.
Låga vibrationsegenskaper:Jämfört med borstmotorer går stegmotorer smidigare, vilket minskar störningar med laseravståndsmoduler
Lång livslängd:Utformad utan slitage på elektriska borstar kan maskinens totala livslängd uppgå till tusentals timmar
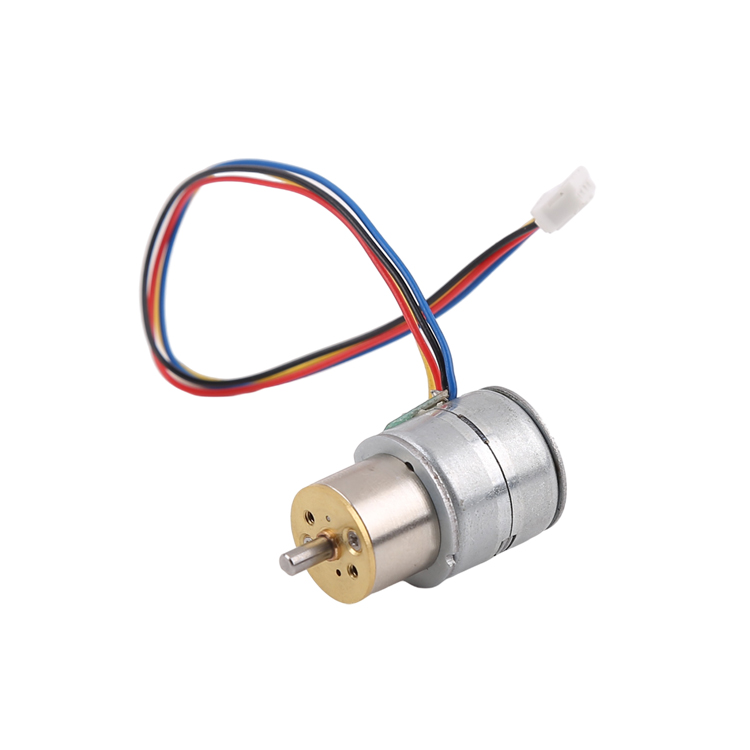
I praktiska tillämpningar använder LDS-moduler ofta permanentmagnetiska mikrostegmotorer med en diameter på 25 mm, i kombination med slutna drivalgoritmer, för att bibehålla låga ljudnivåer (vanligtvis under 40 dB) under höghastighetsrotation.
2. Lyft- och hastighetsjustering av sopmaskinens sidoborste
Sopmaskinens underkantborste ansvarar för att sopa skräpet i vägghörnen och möbelkanterna in i huvudborstens område. Traditionella konstruktioner använder vanliga likströmsmotorer för att driva kantborstens rotation, men kan inte kontrollera kantborstens höjd. Efter att ha infört mikrostegmotorer är det möjligt att uppnå:
Adaptiv lyftning: När sopmaskinen upptäcker mattor eller trösklar styr stegmotorn exakt kantborsten så att den lyfter 5–8 mm, vilket undviker att den trasslar sig.
Justering av flera hastigheter:växlar automatiskt mellan hastighetsväxlar på 200–400 varv/min för olika golvmaterial som trägolv, kakel, mattor etc.
Skydd motståndsomkastning:Genom att detektera stegmotorns otakt uppnås intelligent reversering när kantborsten stöter på motstånd.
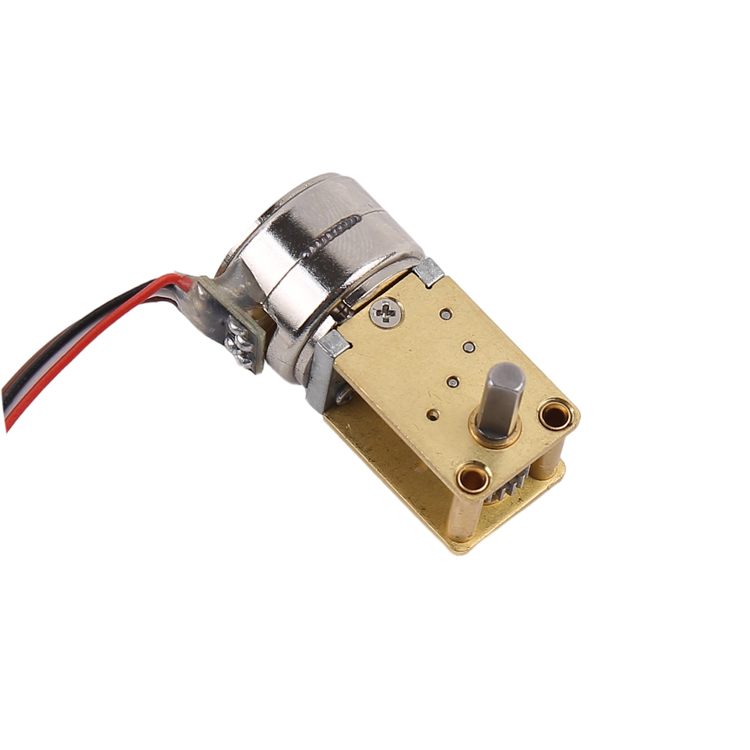
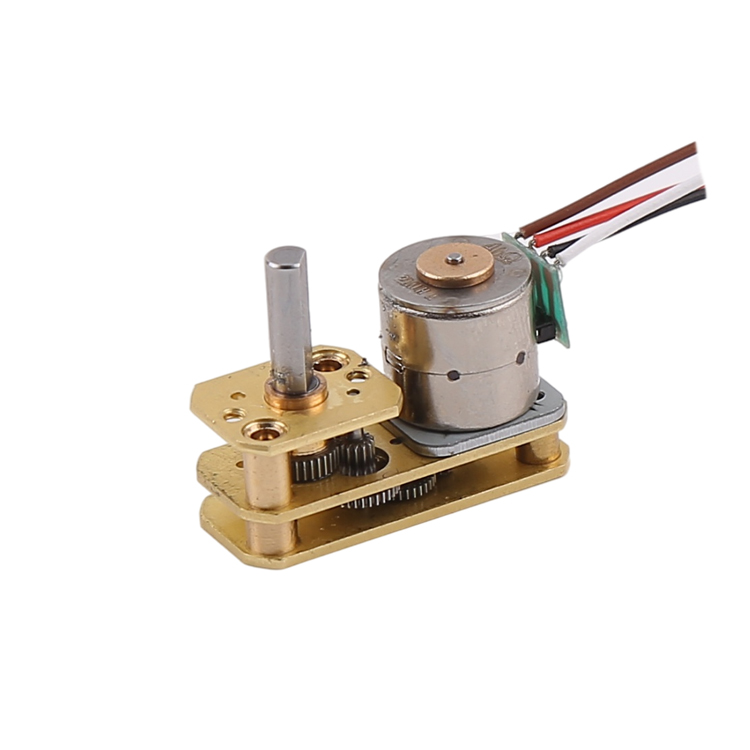
Denna applikation använder vanligtvis en liten stegmotor i kombination med en skruvmekanism för att uppnå linjär rörelse.
3. Precis styrning av fläktspjäll
Sopmaskinens sugkraft beror inte bara på fläkthastigheten, utan också nära relaterad till luftkanalens öppnings- och stängningsstatus. Vissa avancerade modeller använder mikrostegmotorer för att styra luftluckans baffel:
Steglöst justerbar sugkraft:från svag sugkraft i tyst läge till stark sugkraft i kraftfullt läge, linjärt justerbar
Tätning av dammbehållare:Vid avstängning driver stegmotorn baffeln för att helt stänga luftkanalen, vilket förhindrar att damm flödar tillbaka
Energibesparingsoptimering:Kontrollera noggrant öppningen av luftluckan för att minska fläktbelastningen när hög sugkraft inte krävs
I detta tillämpningsscenario är mikrostegmotorernas förmåga att bibehålla vridmomentet särskilt viktig, eftersom de kan bibehålla baffelns position även vid strömavbrott.
4. Bogserlyft- och vibrationsmodul
Under senare år har mikrostegmotorer också spelat en viktig roll i populära allt-i-ett-maskiner för skanning och moppning.
Mopplyftmekanism:När mattan identifieras driver stegmotorn moppfästet att höjas 10–12 mm för att undvika att mattan blir blöt.
Imitation av handtorkningsvibrationer:Genom att snabbt växla mellan stegmotorns fram- och bakåtrotation kan moppen uppnå horisontell fram- och återgående vibration, vilket förbättrar rengöringseffekten av envisa fläckar.
Justering av nedtryck:Kontrollera noggrant moppens tryck på marken beroende på olika underlag (vanligtvis inom intervallet 5-15N)
Fördelarna med mikrostegmotorer jämfört med andra motorer
Jämförelseprojekt: Mikrostegmotor, DC-borstmotor, DC-borstlös motor
Hög positioneringsnoggrannhet (öppen loop) kräver en pulsgivare
Att kontrollera komplexitet är enkelt, okomplicerat och komplext
Utmärkt vridmoment vid låga varvtal, generellt dåligt
Låga, medelhöga, höga och låga ljudnivåer
Medel låg hög kostnad
Lång, kort, lång livslängd
| Jämförelseprojekt: | Mikrostegmotor | Borstad DC-motor | Borstlös likströmsmotor |
| positioneringsnoggrannhet | Hög (öppen slinga)
| Kodare krävs
| Kodare krävs
|
| Kontrollkomplexitet | enkel
| enkel
| komplex |
| Lågt varvtalsvridmoment | excellent
| allmän | dålig
|
| bullernivå | låg | övre mitten
| låg |
| kosta | måttlig | låg | lång |
| livslängd | lång | kort | lång |
För golvsopmaskiner ger mikrostegmotorer exakt positionskontroll utan behov av återkoppling med sluten slinga, vilket har en oersättlig fördel inom LDS-navigering och lyftmekanismer.
Viktiga punkter för att välja mikrostegmotorer för golvsopmaskiner

Vid utveckling av sopmaskiner bör man vid valet av mikrostegmotorer ta hänsyn till följande parametrar:
Yttermått:vanligtvis 20 mm, 25 mm, 28 mm i kvadrat, måste matcha produktens inre utrymme
Bibehåll vridmomentet:LDS-applikationer kräver 0,1 N·m eller mer, och lyftmekanismer kräver 0,2–0,3 N·m
Nominell ström:vanligtvis 0,5–1,0 A, med hänsyn till drivkretsens kapacitet
Stegvinkel:1,8 ° är lämpligt för LDS, 0,9 ° är lämpligt för lyftmekanismer som kräver mer exakt kontroll
Arbetstemperatur:Sopmaskinens innertemperatur kan nå 60 ℃, och en motor med en temperaturbeständighet på ≥ 100 ℃ måste väljas.
vanliga frågor
F: Är det lätt för mikrostegmotorer att tappa steget i golvsopmaskiner?
A: Så länge lastmomentet inte överstiger 70 % av hållmomentet och en lämplig accelerations- och retardationskurva är inställd, är stegförlust extremt sällsynt. High-end-modeller använder en sluten stegmotor för att övervaka rotorpositionen i realtid.
F: Förbrukar mikrostegmotorn elektricitet?
A: Jämfört med fläktar och huvudborstmotorer har stegmotorer mycket låg strömförbrukning (vanligtvis 1–3 W). Det bör dock noteras att stegmotorn fortfarande förbrukar ström samtidigt som den bibehåller sin position, och konstruktionen bör undvika att bibehålla belastningstillståndet under lång tid.
F: Hur minskar man bullret från stegmotorer?
A: Genom att använda segmenterad körteknik, optimera accelerations- och retardationskurvor och lägga till stötdämpande gummikuddar i motorhuset kan driftsbuller effektivt minskas.
Framtida utvecklingstrender
I takt med att dammsugare utvecklas mot smartare, tystare och tunnare riktningar, utvecklas även mikrostegmotortekniken ständigt:
Integrerad drivrutin:Integrera drivkretschipet med motorn i ett enda paket för att minska kretskortets fotavtryck
Tyst teknik:en ny magnetisk kretsdesign och flexibla växelmaterial använder sig av för att ytterligare minska driftsbuller
Ultratunn motor:Höjden kan komprimeras till inom 12 mm, lämplig för ultratunn sopmaskindesign
Slutsats
Även om den är liten är mikrostegmotorn en nyckelkomponent för att uppnå exakt navigering, intelligent hinderundvikning och adaptiv rengöring i golvsopmaskiner. För FoU-ingenjörer inom dammsugare kan en djup förståelse av mikrostegmotorernas arbetsegenskaper och urvalsmetoder hjälpa till att designa produkter med bättre prestanda och högre tillförlitlighet. Med populariseringen av hemservicerobotar kommer tillämpningsscenarierna för mikrostegmotorer att ytterligare expandera och bli en oumbärlig grund för rörelsekontroll för intelligenta mobila plattformar.
Om du utvecklar en sopmaskinsprodukt är du välkommen att kontakta en professionell leverantör av stegmotorer för anpassade lösningar anpassade till specifika arbetsförhållanden.
Publiceringstid: 20 april 2026